I've been working on a new game idea recently, and it calls for a "transformer" type robot made from a controller of each main console (Wii, 360, and PS3). I've roughed out how I want the 360 robot to look like, kind of like a gorilla with two large arms in the front. This is the current concept:

In that pic he doesn't have hind legs, but I've changed it slightly so that he does.
I want the robots to actually be able to transform back into a controller, so what I'm doing is modelling the controller first, in it's completed form, then I'll split up the mesh and add the inner workings of the robot, that way it'll fit nicely together afterwards.
And here's the controller:
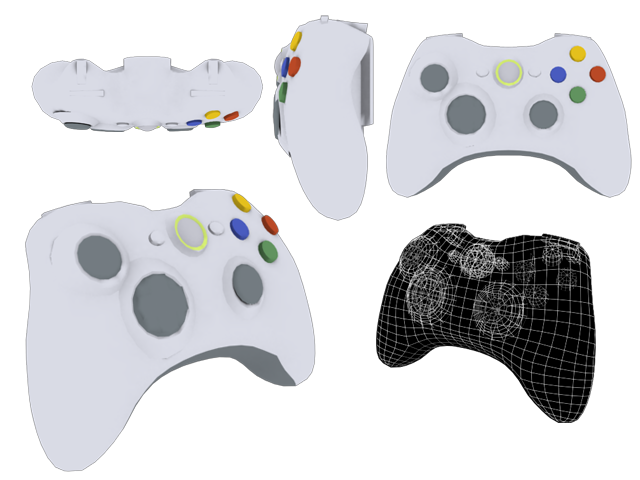
The smoothed version is 2698 polygons, unsmoothed is 712. Im obviously not going to use the smoothed version in the game.
The buttons, swivel sticks, "mounds" that the swivel sticks are on, triggers, paddles, and the 360 button, are seperate objects. I didnt rotate the top-left swivel-stick's mound properly so it has a bit of a gap there, but I'll fix that in the next render.
I'll update with more progress as I work on it.
