Hi All,
I know some of you have tried the vehicle commands and may have crack it or if like me know some of it and working on knowing alot more.
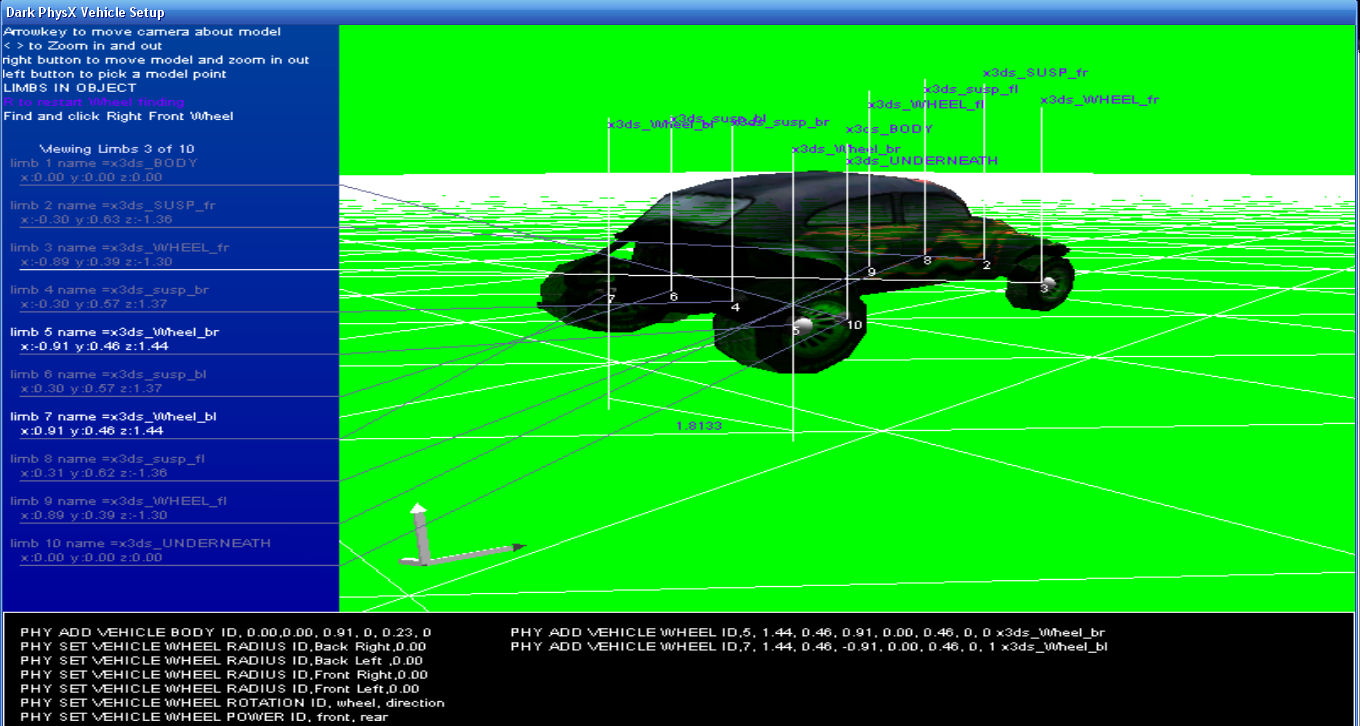
So I thought I put the program together the should help in get the values required to fill in the commands.
Its set to work only with the beach.x file in the vehicle demos as away of seeing what does whats.
if you have another model give it a go and tell me what worked.
hope to have it later that you can use the over object click to find the values of width length and height.
so here it is give it a go.
cheers.
Plus this code is for anyone to add some thing to it.
things to do.
1. get it to go back and load another Vehicle.
2. some way to adjust the chassis before jumping in.
3. some way to adjust the springs before jumping.
4. anything some else thinks suggest
edit updated. 1.024 ver
Rem Project: DarkPhysXVechilesettins
Rem Created: 03/02/2009 09:05:34
sync on
sync rate 60
phy enable debug
phy start
sync on
sync rate 60
global tcx tcy zdist#
`tcx=screen width()/2
`tcy=screen height()/2
dim boxes(2) as float
dim dragbox(8) as float
dim r(8)
dim g(8)
dim b(8)
for i = 1 to 8
r(i)=255
g(i)=255
b(i)=255
next i
rem click box size
boxes(1)=4
boxes(2)=4
global oldpath$
rem run oping credits when made.
set display mode 800,600,32
set text font "airal"
backdrop off
cls rgb(0,0,0)
set window layout 1,1,0
rem preview and keyword vars
global previewindex : previewindex=0
global previewline : previewline=0
global foundline : foundline=-1
global depth# baseheight# rooftop# width# baseheight#
global wheelid1 xrb# yrb# zrb# wheelradiusid1# bodyheightid1#
global wheelid2 xlb# ylb# zlb# wheelradiusid2# bodyheightid2#
global wheelid3 xrf# yrf# zrf# wheelradiusid3# bodyheightid3#
global wheelid4 xlf# ylf# zlf# wheelradiusid4# bodyheightid4#
global camdist#
rem values for limb sizer.
MinX as float
MinY as float
MinZ as float
MaxX as float
MaxY as float
MaxZ as float
MinXnow as float
MinYnow as float
MinZnow as float
MaxXnow as float
MaxYnow as float
MaxZnow as float
`Some variables containing the position of the camera in sphere coordinates
CamDist# = 10.0 :rem how far away from object
CamAngX# = 0.0 :rem start angles
CamAngY# = 0.0
`Target coordinates
TargetX# = 0.0
TargetY# = 0.0
TargetZ# = 0.0
`These variables make the camera rotation faster/slower
CamIntensityMouseZ# = 0.01
CamIntensityMouse# = 0.5
CamIntensityKeys# = 0.5
rem button click count
bcount=0
value as double float
rem Screen dimensions
gap=screen height()/10
topline=0
halfwidth =screen width()/2
middleline=screen width()/2
twothirds =screen width()/4-1
bottomline=screen height()
bottomcamscreen=screen height()-100
verthalfline=topline+((bottomcamscreen-topline)/2)
rightline =screen width()
displaymax=((bottomcamscreen-topline)/18)-2
valuesdisplaymax=((bottomcamscreen-(verthalfline+gap))/18)-2
displaywidthmax=((middleline-leftline)/10)-2
valuesdisplaywidthmax=((rightline-middleline)/10)-9
LookSens#=0.3
rem wlecome box
box screen width()/2-100,screen height()/2-50,screen width()/2+100,screen height()/2+50,rgb(0,0,255),rgb(0,200,255),rgb(0,0,255),rgb(0,200,255)
center text screen width()/2,screen height()/2-6,"Welcome to Dark PhysX Vehicle Setup"
center text screen width()/2,screen height()/2+6,"please pick your Vehicle to load"
sync
sync
delay=timer()+1500
repeat
until timer()>delay or inkey$()<>""
rem open file to get object
file$ = getFileName("load","Load in X model",".x .3ds","*.x; *.3ds")
set camera view 0,twothirds,topline,rightline,bottomcamscreen
set camera aspect 0,(rightline-twothirds)/((bottomline-topline)+0.0)
backdrop on : color backdrop 0,rgb(0,255,0)
make matrix 1,200,200,100,100
ink rgb(255,255,255),0
`print file$
`load the object
id= 2
load object file$,id
`make object cube 1,1
rem camera link
make object sphere 3,.1
`Make a mesh from the object
MAKE MESH FROM OBJECT 1,3
`Add a limb onto the object using the mesh we just made
ADD LIMB 3,1,1
`Offset the limb 700 units away
OFFSET LIMB 3,1,0,0,10-camz#
`Hide the limb for lag reduction
HIDE LIMB 3,1
`Hide the dummy object for lag reduction
HIDE OBJECT 3
ghost object on id,1
position matrix 1,-100,height#,-100
object=100
startobject=100
make object sphere 98,.1
make object box 97,.1,.1,1
make object cone 96,.2
make mesh from object 1,97
make mesh from object 2,96
hide object 97
hide object 96
add limb 98,1,1 :rem x pole
add limb 98,2,1 :rem y pole
add limb 98,3,1 :rem z pole
add limb 98,4,2
add limb 98,5,2
add limb 98,6,2
link limb 98,0,1
link limb 98,0,2
link limb 98,0,3
rem x pole
rotate limb 98,1,0,90,0
offset limb 98,1,.5,0,0
offset limb 98,4,1.1,0,0
rotate limb 98,4,0,0,-90
rem y pole
rotate limb 98,2,90,0,0
offset limb 98,2,0,.5,0
offset limb 98,5,0,1.1,0
rem z pole
rotate limb 98,3,0,0,-90
offset limb 98,3,0,0,.5
offset limb 98,6,0,0,1
rotate limb 98,6,90,0,0
hide object 97
rem x y z pointer
lock object on 98
position object 98,-5,-5,10
backdrop on
dim loc(5)
dim wheel(4) as float
rem start of loop ++++++++++++++++++++++++++++++++++++++++++++
do
box 0,0,twothirds,bottomcamscreen,RGB(0,0,155),RGB(0,64,155),RGB(0,0,155),RGB(0,64,155)
box 0,bottomcamscreen,rightline,bottomline,rgb(255,255,255),rgb(255,255,255),rgb(255,255,255),rgb(255,255,255)
box 1,bottomcamscreen+1,rightline-1,bottomline-1,rgb(0,0,0),rgb(0,0,0),rgb(0,0,0),rgb(0,0,0)
ink rgb(255,255,255),0
set cursor 0,0
mmx# = mousemovex()
mmy# = mousemovey()
mmz# = mousemovez()
`Handle rotation
gosub RotateCam
gosub pickobject
if key<1
repeat
set cursor 0,0
print "press key 1 to 4 Presenting model view?"
print "1. Vehicle Back view."
print "2. Vehicle Front view."
print "3. Vehicle left side view."
print "4. Vehicle Right side view."
if inkey$()=>"1" and inkey$()<="4"
key=val(inkey$())
endif
print "you picked ";key
if key=1
` rotate object id,0,90,0
` fix object pivot id
endif
if key=2
rotate object id,0,180,0
fix object pivot id
endif
if key=3
rotate object id,0,90,0
fix object pivot id
endif
if key=4
rotate object id,0,-90,0
fix object pivot id
endif
gosub RotateCam
sync
until key>0
endif
`print "key=";key
rem make limbs list
print "Arrowkey to move camera about model"
print "< > to Zoom in and out. + - to move up/down list"
print "right button to move model and zoom in out"
print "left button to pick a model point"
print "LIMBS IN OBJECT"
rem get the list of limbs
gosub checklimbs
gosub listalimb
pt=1
for t = startobject to lastobject
if object exist(t)
if object screen x(t)>twothirds
ink rgb(255,255,255),0
text object screen x(t),object screen y(t),str$(t-startobject+1)
line object screen x(t),object screen y(t),object screen x(t),object screen y(t)-150
ink RGB(128,0,255),0
text object screen x(t),object screen y(t)-170+(pt*3),partname$(pt,0)
inc pt
endif
endif
next t
done=1
if bcount<5
ink 0,0
print "R to restart Wheel finding"
if keystate(19)=1
bcount=0
for r=1 to limbnumbrs
partname$(r,1)="0"
next t
endif
ink rgb(255,255,255),0
if bcount=0
print "Find and click Right Back Wheel"
endif
if bcount=1
print "Find and cilck Left Back Wheel"
endif
if bcount=2
print "Find and click Right Front Wheel"
endif
if bcount=3
print "Find and click Left Front wheel"
endif
if bcount=4
print "Find and click Left Front suppenion"
endif
endif
drawstartobject=99
for bb= 0 to 4
`print loc(bb)
if bb=0 and loc(bb)<>0
line object screen x(drawstartobject+loc(bb)),object screen y(drawstartobject+loc(bb)),object screen x(drawstartobject+loc(bb)),object screen y(drawstartobject+loc(bb))+100
endif
if bb=1 and loc(bb)<>0
line object screen x(drawstartobject+loc(bb)),object screen y(drawstartobject+loc(bb)),object screen x(drawstartobject+loc(bb)),object screen y(drawstartobject+loc(bb))+100
rem lik line
line object screen x(drawstartobject+loc(bb)),object screen y(drawstartobject+loc(bb))+90,object screen x(drawstartobject+loc(bb-1)),object screen y(drawstartobject+loc(bb-1))+90
width# = ObjDistToObj(drawstartobject+loc(bb), drawstartobject+loc(bb-1))
ink RGB(128,0,255),0
center text (object screen x(drawstartobject+loc(bb))+ object screen x(drawstartobject+loc(bb-1)))/2,(object screen y(drawstartobject+loc(bb))+ object screen y(drawstartobject+loc(bb-1)))/2+95,str$(width#,4)
ink rgb(255,255,255),0
endif
If bb=2 and loc(bb)<>0
line object screen x(drawstartobject+loc(bb)),object screen y(drawstartobject+loc(bb)),object screen x(drawstartobject+loc(bb)),object screen y(drawstartobject+loc(bb))+100
rem join line
line object screen x(drawstartobject+loc(bb)),object screen y(drawstartobject+loc(bb))+90,object screen x(drawstartobject+loc(bb-2)),object screen y(drawstartobject+loc(bb-2))+90
depth# = ObjDistToObj(drawstartobject+loc(bb), drawstartobject+loc(bb-2))
ink RGB(128,0,255),0
center text (object screen x(drawstartobject+loc(bb))+ object screen x(drawstartobject+loc(bb-2)))/2,(object screen y(drawstartobject+loc(bb))+ object screen y(drawstartobject+loc(bb-2)))/2+95,str$(depth#,4)
ink rgb(255,255,255),0
endif
If bb=3 and loc(bb)<>0
line object screen x(drawstartobject+loc(bb)),object screen y(drawstartobject+loc(bb)),object screen x(drawstartobject+loc(bb)),object screen y(drawstartobject+loc(bb))+100
rem join line
line object screen x(drawstartobject+loc(bb)),object screen y(drawstartobject+loc(bb))+90,object screen x(drawstartobject+loc(bb-1)),object screen y(drawstartobject+loc(bb-1))+90
bwidth# = ObjDistToObj(drawstartobject+loc(bb), drawstartobject+loc(bb-1))
ink RGB(128,0,255),0
center text (object screen x(drawstartobject+loc(bb))+ object screen x(drawstartobject+loc(bb-1)))/2,(object screen y(drawstartobject+loc(bb))+ object screen y(drawstartobject+loc(bb-1)))/2+95,str$(bwidth#,4)
ink rgb(255,255,255),0
endif
rem set the PhysX xyz position of wheels to VEHICLE BODY .
if loc(0)<>0
xrb#=abs(object position x(id)-object position x (drawstartobject+loc(0)))
yrb#=abs(object position y (drawstartobject+loc(0))-object position y(id))
zrb#=abs(object position z (drawstartobject+loc(0))-object position z(id))
endif
if loc(1)<>0
xlb#=abs(object position x (drawstartobject+loc(1))-object position x(id))
ylb#=abs(object position y (drawstartobject+loc(1))-object position y(id))
zlb#=abs(object position z(id)-object position z (drawstartobject+loc(1)))
endif
if loc(2)<>0
xrf#=abs(object position x (drawstartobject+loc(2))-object position x(id))
yrf#=abs(object position y (drawstartobject+loc(2))-object position y(id))
zrf#=abs(object position z (drawstartobject+loc(2))-object position z(id))
endif
if loc(3)<>0
xlf#=abs(object position x(id)-object position x (drawstartobject+loc(3)))
ylf#=abs(object position y (drawstartobject+loc(3))-object position y(id))
zlf#=abs(object position z(id)-object position z (drawstartobject+loc(3)))
endif
next bb
if loc(3)<>0
for wl = 0 to 3
numberlimb=loc(wl)
gosub limbsize
wheel(wl)=YSize#/2 :`+0.1
next wl
endif
if loc(4)<>0
numberlimb=loc(4)
gosub limbsize
sup#=ysize#
endif
if loc(1)<>0
originy# =object size y(id)
endif
if loc(3)>0
tcx=object screen x(id)
tcy=object screen y(id)
rem start positions
rem top left x,y
if bdrag<>1
bdrag=1
dragbox(1)=tcx-15
dragbox(2)=tcy-15
rem top right x,y
dragbox(3)=tcx+15
dragbox(4)=tcy-15
rem bottom right x,y
dragbox(5)=tcx+15
dragbox(6)=tcy+15
rem bottom left x,y
dragbox(7)=tcx-15
dragbox(8)=tcy+15
endif
endif
`gosub drawabox
if loc(3)<>0 and made<>1
made=1
baseheight# = wheel(0): rem radius of wheel
`make object box 50,width#,originy#-baseheight#,depth#
height#=object size y(id)
width#=object size x(id)
depth#=object size z(id)
make object box 50,width#,height#,depth#
SET OBJECT WIREFRAME 50,1
position object 50,0,(height#/2)-(baseheight#*2),0
rooftop#=height#-baseheight#
endif
ink rgb(255,255,255),0
text 10,bottomcamscreen+12,"PHY ADD VEHICLE BODY ID "+str$(depth#/2,2)+","+str$(rooftop#-baseheight#,2)+","+str$(width#/2,2)+", 0,"+str$(sup#,2)+", 0"
mesg5$="PHY ADD VEHICLE BODY ID "+str$(depth#/2,2)+","+str$(rooftop#-baseheight#,2)+","+str$(width#/2,2)+", 0,"+str$(sup#,2)+",0"
text 10,bottomcamscreen+12*2,"PHY SET VEHICLE WHEEL RADIUS ID,Back Right,"+str$(wheel(0),2)
text 10,bottomcamscreen+12*3,"PHY SET VEHICLE WHEEL RADIUS ID,Back Left ,"+str$(wheel(1),2)
text 10,bottomcamscreen+12*4,"PHY SET VEHICLE WHEEL RADIUS ID,Front Right,"+str$(wheel(2),2)
text 10,bottomcamscreen+12*5,"PHY SET VEHICLE WHEEL RADIUS ID,Front Left,"+str$(wheel(3),2)
text 10,bottomcamscreen+12*6,"PHY SET VEHICLE WHEEL ROTATION ID, wheel, direction"
text 10,bottomcamscreen+12*7,"PHY SET VEHICLE WHEEL POWER ID, front, rear"
if loc(0)<>0
text 300,bottomcamscreen+12*1,"PHY ADD VEHICLE WHEEL ID,"+str$(loc(0),0)+", "+str$(xrb#,2)+", "+str$(yrb#,2)+", "+str$(zrb#,2)+", "+ str$(wheel(0),2)+", "+str$( object position y(drawstartobject+loc(0))*2,2)+", 0, 0 "+partname$(loc(0),0)
wheelid1=loc(0):wheelradiusid1#=wheel(0):bodyheightid1#=object position y(drawstartobject+loc(0))*2
mesg1$="PHY ADD VEHICLE WHEEL ID,"+str$(loc(0),0)+", "+str$(xrb#,2)+", "+str$(yrb#,2)+", "+str$(zrb#,2)+", "+ str$(wheel(0),2)+", "+str$( object position y(drawstartobject+loc(0))*2,2)+", 0, 0 :`"+partname$(loc(0),0)
endif
if loc(1)<>0
text 300,bottomcamscreen+12*2,"PHY ADD VEHICLE WHEEL ID,"+str$(loc(1),0)+", "+str$(xlb#,2)+", "+str$(ylb#,2)+", -"+str$(zlb#,2)+", "+ str$(wheel(1),2)+", "+str$( object position y(drawstartobject+loc(1))*2,2)+", 0, 1 "+partname$(loc(1),0)
wheelid2=loc(1):wheelradiusid2#=wheel(1):bodyheightid2#=object position y(drawstartobject+loc(1))*2
mesg2$="PHY ADD VEHICLE WHEEL ID,"+str$(loc(1),0)+", "+str$(xlb#,2)+", "+str$(ylb#,2)+", -"+str$(zlb#,2)+", "+ str$(wheel(1),2)+", "+str$( object position y(drawstartobject+loc(1))*2,2)+", 0, 1 :`"+partname$(loc(1),0)
endif
if loc(2)<>0
text 300,bottomcamscreen+12*3,"PHY ADD VEHICLE WHEEL ID,"+str$(loc(2),0)+", -"+str$(xrf#,2)+", "+str$(yrf#,2)+", -"+str$(zrf#,2)+", "+ str$(wheel(2),2)+", "+str$( object position y(drawstartobject+loc(2))*2,2)+", 1, 0 "+partname$(loc(2),0)
wheelid3=loc(2):wheelradiusid3#=wheel(2):bodyheightid3#=object position y(drawstartobject+loc(2))*2
mesg3$="PHY ADD VEHICLE WHEEL ID,"+str$(loc(2),0)+", -"+str$(xrf#,2)+", "+str$(yrf#,2)+", -"+str$(zrf#,2)+", "+ str$(wheel(2),2)+", "+str$( object position y(drawstartobject+loc(2))*2,2)+", 1, 0 :`"+partname$(loc(2),0)
endif
if loc(3)<>0
text 300,bottomcamscreen+12*4,"PHY ADD VEHICLE WHEEL ID,"+str$(loc(3),0)+", -"+str$(xlf#,2)+", "+str$(ylf#,2)+", "+str$(zlf#,2)+", "+ str$(wheel(3),2)+", "+str$( object position y(drawstartobject+loc(3))*2,2)+", 1, 1 "+partname$(loc(3),0)
wheelid4=loc(3):wheelradiusid4#=wheel(3):bodyheightid4#=object position y(drawstartobject+loc(3))*2
mesg4$="PHY ADD VEHICLE WHEEL ID,"+str$(loc(3),0)+", -"+str$(xlf#,2)+", "+str$(ylf#,2)+", "+str$(zlf#,2)+", "+ str$(wheel(3),2)+", "+str$( object position y(drawstartobject+loc(3))*2,2)+", 1, 1 :`"+partname$(loc(3),0)
endif
`phy add vehicle wheel 1, 5, 1.5, 0.3, 1.1, 0.6, 0.2, 0, 0
`phy add vehicle wheel 1, 7, 1.5, 0.3, -1.1, 0.6, 0.2, 0, 1
`phy add vehicle wheel 1, 3, -1.5, 0.3, -1.1, 0.6, 0.2, 1, 0
`phy add vehicle wheel 1, 9, -1.5, 0.3, 1.1, 0.6, 0.2, 1, 1
if loc(3)<>0
text 10,100-12,"load to clipboard ready <press C>"
if keystate(46)
WRITE TO CLIPBOARD mesg5$+chr$(13)+chr$(10)+mesg1$+chr$(13)+chr$(10)+mesg2$+chr$(13)+chr$(10)+mesg3$+chr$(13)+chr$(10)+mesg4$
endif
endif
if loc(3)<>0
text 10,100-24,"jump in and drive ready."
if keystate(36)
goto jumpin
endif
endif
text 400,100,str$(camz#)
sync
loop
listalimb:
rem control
ink rgb(225,225,255),0
if scancode()=33 and enterkeyword=0 then enterkeyword=1 : clear entry buffer
if scancode()=49 and nextkeyword=0 and pressed=0 then nextkeyword=2 : pressed=timer() : nextprompt=10
if nextkeyword=3 then nextkeyword=2
if nextkeyword<>0 or previewline<>showpreviewline or nextprompt>0
rem prompt next search
if nextprompt>0 then dec nextprompt
else
if scancode()=0 then pressed=0
if pressed<>0 and timer()-pressed>150 and scancode()<>49 then pressed=0
if pressed=0
if keystate(12)=1 and high>1 then dec high : pressed=timer() : foundline=-1
if keystate(13)=1 and high<listindex then inc high : pressed=timer() : foundline=-1
if keystate(26)=1 then move object left 1,1
if keystate(27)=1 then move object right 1,1
if keystate(25)=1 then roll object left 1,1
if keystate(39)=1 then roll object right 1,1
if keystate(201)=1 and high>1
dec high,30 : pressed=timer() : foundline=-1
if high<1 then high=1
endif
if keystate(209)=1 and high<listindex
inc high,30 : pressed=timer() : foundline=-1
if high>listindex then high=listindex
endif
endif
endif
rem control preview
scrollpos=high-5
if scrollpos<1 then scrollpos=1
if high<>previewindex
previewindex=high
previewline=0
showpreviewline=0
endif
rem display
ink rgb(225,225,255),0
text 10,100," Viewing Limbs "+str$(high)+" of "+str$(listindex)
scrollposmax=scrollpos+10
if scrollposmax>listindex then scrollposmax=listindex
ly=0
for i=scrollpos to scrollposmax
if partname$(i,1)="1"
ink rgb(255,255,255),0
else
ink rgb(105,105,155),0
endif
text 5,112+ly,"limb "+str$(i)+" name ="+partname$(i,0)
`text 10,112+ly,str$(i-1)+" "+list$(i,0)+" "
inc ly,12
`if i<>0 or i>limbnumbrs
text 5,112+ly," x:"+str$(limb position x(id,i),2)+" y:"+str$(limb position y(id,i),2)+" z:"+str$(limb position z(id,i),2)
`inc ly,12
if limb exist(id,i)
if done<>1
partname$(i,2)=str$(object)
make object sphere object,0.2
position object object,limb position x(id,i),limb position y(id,i),limb position z(id,i)
inc object
endif
lastobject=object
endif
text 5,112+ly," x:"+str$(limb position x(id,i),2)+" y:"+str$(limb position y(id,i),2)+" z:"+str$(limb position z(id,i),2)
` text 10,112+ly,"x:"+str$(limb position x(1,i),2)+" y:"+str$(limb position y(1,i),2)+" z:"+str$(limb position z(1,i),2)
inc ly,12
`endif
if high=i
ink rgb(255,255,255),0
else
ink rgb(105,105,155),0
endif
line 10,112+ly,200,112+ly
if object exist(99+i)
line 200,112+ly,object screen x(99+i),object screen y(99+i)
endif
inc ly,12
next i
return
matrixhieght:
if done<>1
done=1
repeat
if downkey()=1
height#=height#+0.1
endif
if upkey()=1
height#=height#-0.5
endif
rem set the martrix depth
position matrix 1,-100,height#,-100
until returnkey()=1
endif
return
`Rotate camera
RotateCam:
gosub RotateCamMouse
gosub RotateCamKeys
gosub UpdateCam
gosub update3Dpointer
return
`Rotation through mouse
RotateCamMouse:
`If mouse is right-clicked
if mouseclick() = 2
`Allow rotation around the object
CamAngX# = wrapvalue(CamAngX# + mmy# * CamIntensityMouse#)
CamAngY# = wrapvalue(CamAngY# + mmx# * CamIntensityMouse#)
Camdist# = wrapvalue(Camdist# - mmz# * CamIntensityMouseZ#)
` makezoom(camdist#)
endif
return
RotateCamKeys:
`Allow keys to make camera rotate
CamAngX# = wrapvalue(CamAngX# + (upkey() - downkey()) * CamIntensityKeys#)
CamAngY# = wrapvalue(CamAngY# + (rightkey() - leftkey())*CamIntensityKeys#)
Camdist# = wrapvalue(Camdist# + (keystate(51)- keystate(52))*CamIntensityKeys#)
zdist#=-camdist#
return
UpdateCam:
`Calculate position
CamX# = newxvalue(TargetX#, CamAngY#, cos(CamAngX#) * CamDist#)
CamY# = sin(CamAngX#) * CamDist#
CamZ# = newzvalue(TargetZ#, CamAngY#, cos(CamAngX#) * CamDist#)
`Update camera
position camera CamX#, CamY#, CamZ#
point camera TargetX#, TargetY#, TargetZ#
return
update3Dpointer:
if camAngX#>270 and camAngX#<90
rotate object 98,CamAngX#, CamAngY#, CamAngZ#
else
if camAngX#>90 and camAngX#<270
rotate object 98,CamAngX#, CamAngY#, CamAngZ#-180
endif
rotate object 98,CamAngX#, CamAngY#, CamAngZ#
endif
return
pickobject:
dd=0
ink 0,0
`text 300,40,str$(lastobject)+" "+str$(lastpick)+" "+str$(picked_object-drawstartobject)
`text 300,50,str$(pick object(mousex(),mousey(),startobject,lastobject))
ink rgb(255,255,255),0
if mouseclick()=0 then pickmode=0
if mouseclick()=1
if pick object(mousex(),mousey(),startobject,lastobject)>0
if pickmode=0
picked_object=pick object(mousex(),mousey(),drawstartobject,lastobject)
d#=get pick distance()
x#=get pick vector x():y#=get pick vector y():z#=get pick vector z()
inc pickmode
rem button click count
if lastpick<>picked_object
if partname$(picked_object-drawstartobject,1)<>"1"
partname$(picked_object-drawstartobject,1)="1"
loc(bcount)=picked_object-drawstartobject
inc bcount
endif
endif
lastpick=picked_object
endif
endif
endif
Return
function ObjDistToObj(Obj1 , Obj2 )
dx# = object position x(Obj1) - object position x(Obj2)
dy# = object position y(Obj1) - object position y(Obj2)
dz# = object position z(Obj1) - object position z(Obj2)
dx# = dx# * dx#
dy# = dy# * dy#
dz# = dz# * dz#
Distn# = sqrt(dx# + dy# + dz#)
endfunction Distn#
checklimbs:
if cl=1 then return
perform checklist for object limbs id
limbnumbrs=checklist quantity()
dim partname$(limbnumbrs,5)
for c=1 to limbnumbrs
partname$(checklist value a(c),0)=checklist string$(c)
partname$(checklist value a(c),1)="0"
next c
listindex=limbnumbrs-1
cl=1
return
limbsize:
lock vertexdata for limb id, numberlimb
MinX = get vertexdata position x(0)
MinY = get vertexdata position y(0)
MinZ = get vertexdata position z(0)
MaxX = get vertexdata position x(0)
MaxY = get vertexdata position y(0)
MaxZ = get vertexdata position z(0)
for i = get vertexdata vertex count() - 1 to 1 step -1
MinX = get vertexdata position x(i)
MinY = get vertexdata position y(i)
MinZ = get vertexdata position z(i)
MaxX = get vertexdata position x(i)
MaxY = get vertexdata position y(i)
MaxZ = get vertexdata position z(i)
if minX<minXnow
minXnow=minX
endif
if miny<minynow
minynow=miny
endif
if maxz<maxznow
maxznow=maxz
endif
if maxX>maxXnow
maxXnow=maxX
endif
if maxy>maxynow
maxynow=maxy
endif
if maxz>maxznow
maxznow=maxz
endif
next
unlock vertexdata
XSize# = MaxXnow - MinXnow
YSize# = MaxYnow - MinYnow
ZSize# = MaxZnow - MinZnow
return
function makebox()
rem corners points
box dragbox(1)-boxes(1)-zdist#,dragbox(2)-boxes(2)-zdist#,dragbox(1)+boxes(1)-zdist#,dragbox(2)+boxes(2)-zdist#,rgb(r(1),g(1),b(1)),rgb(r(1),g(1),b(1)),rgb(r(1),g(1),b(1)),rgb(r(1),g(1),b(1))
box dragbox(3)-boxes(1)+zdist#,dragbox(4)-boxes(2)-zdist#,dragbox(3)+boxes(1)+zdist#,dragbox(4)+boxes(2)-zdist#,rgb(r(2),g(2),b(2)),rgb(r(2),g(2),b(2)),rgb(r(2),g(2),b(2)),rgb(r(2),g(2),b(2))
box dragbox(5)-boxes(1)+zdist#,dragbox(6)-boxes(2)+zdist#,dragbox(5)+boxes(1)+zdist#,dragbox(6)+boxes(2)+zdist#,rgb(r(3),g(3),b(3)),rgb(r(3),g(3),b(3)),rgb(r(3),g(3),b(3)),rgb(r(3),g(3),b(3))
box dragbox(7)-boxes(1)-zdist#,dragbox(8)-boxes(2)+zdist#,dragbox(7)+boxes(1)-zdist#,dragbox(8)+boxes(2)+zdist#,rgb(r(4),g(4),b(4)),rgb(r(4),g(4),b(4)),rgb(r(4),g(4),b(4)),rgb(r(4),g(4),b(4))
rem midpoint boxes
rem top
box (dragbox(1)-zdist#+dragbox(3)-zdist#)/2-boxes(1),(dragbox(1)-zdist#+dragbox(3)-zdist#)/2-boxes(2),(dragbox(1)-zdist#+dragbox(3)+zdist#)/2+boxes(1),(dragbox(2)+dragbox(4))/2+boxes(2),rgb(r(5),g(5),b(5)),rgb(r(5),g(5),b(5)),rgb(r(5),g(5),b(5)),rgb(r(5),g(5),b(5))
rem right
`box (dragbox(3)+dragbox(5)+zdist#)/2-boxes(1),(dragbox(4)+dragbox(6)-zdist#)/2-boxes(2),(dragbox(3)+dragbox(5)+zdist#)/2+boxes(1),(dragbox(4)+dragbox(6)+zdist#)/2+boxes(2),rgb(r(6),g(6),b(6)),rgb(r(6),g(6),b(6)),rgb(r(6),g(6),b(6)),rgb(r(6),g(6),b(6))
rem bottom
`box (dragbox(5)+dragbox(7)+zdist#)/2-boxes(1),(dragbox(6)+dragbox(8)-zdist#)/2-boxes(2),(dragbox(5)+dragbox(7)+zdist#)/2+boxes(1),(dragbox(6)+dragbox(8)+zdist#)/2+boxes(2),rgb(r(7),g(7),b(7)),rgb(r(7),g(7),b(7)),rgb(r(7),g(7),b(7)),rgb(r(7),g(7),b(7))
rem left
`box (dragbox(1)+dragbox(7)-zdist#)/2-boxes(1),(dragbox(8)+dragbox(2)-zdist#)/2-boxes(2),(dragbox(1)+dragbox(7)+zdist#)/2+boxes(1),(dragbox(8)+dragbox(2)+zdist#)/2+boxes(2),rgb(r(8),g(8),b(8)),rgb(r(8),g(8),b(8)),rgb(r(8),g(8),b(8)),rgb(r(8),g(8),b(8))
rem connecting lines
rem top
line dragbox(1)-zdist#,dragbox(2)-zdist#,dragbox(3)+zdist#,dragbox(4)-zdist#
rem right
line dragbox(3)+zdist#,dragbox(4)-zdist#,dragbox(5)+zdist#,dragbox(6)+zdist#
rem bottom
line dragbox(5)+zdist#,dragbox(6)+zdist#,dragbox(7)-zdist#,dragbox(8)+zdist#
rem left
line dragbox(7)-zdist#,dragbox(8)+zdist#,dragbox(1)-zdist#,dragbox(2)-zdist#
endfunction
function isindragbox()
mx=mousex()
my=mousey()
text 0,60,str$(mx)+" "+str$(my)
for i = 1 to 8 step 2
text 0,0+(i*6),str$(dragbox(i) )+" "+str$(dragbox(i+1) )
next i
if mx>dragbox(1)-boxes(1) and mx<dragbox(1)+boxes(1) and my>dragbox(2)-boxes(2) and my<dragbox(2)+boxes(2)
r(1)=255:g(1)=0:b(1)=0
while mouseclick()<>0
drag(1,2)
endwhile
else
r(1)=255:g(1)=255:b(1)=255
endif
if mx>dragbox(3)-boxes(1) and mx<dragbox(3)+boxes(1) and my>dragbox(4)-boxes(2) and my<dragbox(4)+boxes(2)
r(2)=255:g(2)=0:b(2)=0
while mouseclick()<>0
drag(3,4)
endwhile
else
r(2)=255:g(2)=255:b(2)=255
endif
if mx>dragbox(5)-boxes(1) and mx<dragbox(5)+boxes(1) and my>dragbox(6)-boxes(2) and my<dragbox(6)+boxes(2)
r(3)=255:g(3)=0:b(3)=0
while mouseclick()<>0
drag(5,6)
endwhile
else
r(3)=255:g(3)=255:b(3)=255
endif
if mx>dragbox(7)-boxes(1) and mx<dragbox(7)+boxes(1) and my>dragbox(8)-boxes(2) and my<dragbox(8)+boxes(2)
r(4)=255:g(4)=0:b(4)=0
while mouseclick()<>0
drag(7,8)
endwhile
else
r(4)=255:g(4)=255:b(4)=255
endif
rem mid point boxes
if mx>(dragbox(1)+dragbox(3))/2-boxes(1) and mx<(dragbox(1)+dragbox(3))/2+boxes(1) and my>(dragbox(2)+dragbox(4))/2-boxes(2) and my<(dragbox(2)+dragbox(4))/2+boxes(2)
r(5)=255:g(5)=0:b(5)=0
oldmy=my
oldy1=dragbox(2)
oldy2=dragbox(4)
while mouseclick()<>0
` cls
` text 0,0,"draging on"
my=mousey()
dragbox(2)=oldy1+( my-oldmy)
dragbox(4)= oldy2+(my -oldmy)
makebox()
sync
endwhile
else
r(5)=255:g(5)=255:b(5)=255
endif
if mx>(dragbox(3)+dragbox(5))/2-boxes(1) and mx<(dragbox(3)+dragbox(5))/2+boxes(1) and my>(dragbox(4)+dragbox(6))/2-boxes(2) and my<(dragbox(4)+dragbox(6))/2+boxes(2)
r(6)=255:g(6)=0:b(6)=0
oldmx=mx
oldx1=dragbox(3)
oldx2=dragbox(5)
while mouseclick()<>0
` cls
`text 0,0,"draging on"
mx=mousex()
dragbox(3)=oldx1+(mx-oldmx)
dragbox(5)= oldx2+(mx-oldmx)
makebox()
sync
endwhile
else
r(6)=255:g(6)=255:b(6)=255
endif
if mx>(dragbox(5)+dragbox(7))/2-boxes(1) and mx<(dragbox(5)+dragbox(7))/2+boxes(1) and my>(dragbox(6)+dragbox(8))/2-boxes(2) and my<(dragbox(6)+dragbox(8))/2+boxes(2)
r(7)=255:g(7)=0:b(7)=0
oldmy=my
oldy1=dragbox(6)
oldy2=dragbox(8)
while mouseclick()<>0
` cls
` text 0,0,"draging on"
my=mousey()
dragbox(6)=oldy1+( my-oldmy)
dragbox(8)= oldy2+(my -oldmy)
makebox()
sync
endwhile
else
r(7)=255:g(7)=255:b(7)=255
endif
if mx>(dragbox(7)+dragbox(1))/2-boxes(1) and mx<(dragbox(7)+dragbox(1))/2+boxes(1) and my>(dragbox(8)+dragbox(2))/2-boxes(2) and my<(dragbox(8)+dragbox(2))/2+boxes(2)
r(8)=255:g(8)=0:b(8)=0
oldmx=mx
oldx1=dragbox(7)
oldx2=dragbox(1)
while mouseclick()<>0
` cls
`text 0,0,"draging on"
mx=mousex()
dragbox(7)=oldx1+( mx-oldmx)
dragbox(1)= oldx2+(mx -oldmx)
makebox()
sync
endwhile
else
r(8)=255:g(8)=255:b(8)=255
endif
endfunction
function drag(a,b)
`cls
` text 0,0,"draging on"
mx=mousex()
my=mousey()
dragbox(a)=mx
dragbox(b)=my
makebox()
sync
endfunction
jumpin:
rem Vehicle Physics
cls
set camera view 0,0,0,rightline,bottomline
`set camera aspect 0,0
DELETE OBJECTS 4, lastobject+1
`delete matrix 1
`delete object id
delete object 1
rem Lights and camera
make light 1 : set directional light 1, -5, -5, 5
position camera -20, 20, 25 : point camera 0, 10, 0
set camera fov 90
rem Load scene
set dir "C:Program FilesDark Basic SoftwareDark Basic ProfessionalProjectsDark PhysicsDemosVehiclesVehicle ArenaScene"
load object "levelbanktestleveluniverse.dbo",1
scale object 1,10,10,10 :
phy make rigid body static mesh 1
set dir ".."
ghost object on id
id=2
rem Load buggy
`load object "beach.x", id
`load image "beachBu2.tga",2
`load image "dbprocubemap.dds",3
`texture object id,2
` set blend mapping on id,1,3,2,16
position object id, 15, 4, -25
`offset limb id,0,0,-0.5,0
if key=1
rotate limb id,0,0,-90,0
endif
if key=2
rotate limb id,0,0,90,0
endif
if key=3
rotate limb id,0,0,-90,0
endif
rem Be aware the vehicle width and length orientation
phy create vehicle id
PHY ADD VEHICLE BODY ID,depth#/2,rooftop#-baseheight#,width#/2, 0,sup#, 0
`PHY ADD VEHICLE BODY ID, (depth#+baseheight#)/2,rooftop#/2, width#/2, 0, baseheight# , 0
PHY ADD VEHICLE WHEEL ID,wheelid1, -xrb#, yrb#,-zrb#,wheelradiusid1#,bodyheightid1#, 1, 0
PHY ADD VEHICLE WHEEL ID,wheelid2, -xlb#,ylb#,zlb#,wheelradiusid2#,bodyheightid2#, 1, 1
PHY ADD VEHICLE WHEEL ID,wheelid3,xrf#,yrf#,zrf#,wheelradiusid3#,bodyheightid3#, 0, 0
PHY ADD VEHICLE WHEEL ID,wheelid4,xlf#, ylf#,-zlf#,wheelradiusid4#,bodyheightid4#, 0, 1
steeringDelta# = 0.1 :
phy set vehicle steering delta id, steeringDelta#
phy set vehicle max steering angle id, 0.4
phy set vehicle auto id, 1
phy set vehicle wheel multiplier id,0
phy set vehicle suspension spring id,100
phy build vehicle id
rem follower object invisible
`make object sphere 3,10 : hide object 3
rem Load logo sprite
`load image "logo.png", 100000
`sprite 1, 0, 600 - 60, 100000
` movement
g_fSpeed# = 0.05
g_fTurn# = 0.3
rem Main
do
rem Follow buggy
position object 3,object position x(id),object position y(id),object position z(id)
set object to object orientation 3,id
move object 3,-100
point object 3,object position x(id),object position y(id),object position z(id)
dist#=5.0 : high#=2.5 : angle#=object angle y(3)+90
set camera to follow object position x(id), object position y(id), object position z(id), angle#, dist#, high#, 1, 0
`
rem Control buggy
phy set vehicle motor force id,0.0
gosub driveCar
`
rem Update physics and screen
phy update
sync
`
loop
driveCar:
`
rem movement
key = 0
if upkey ( ) = 1 then phy set vehicle motor force id,300 : key = 1 : phy set vehicle wheel multiplier id,50
if downkey ( ) = 1 then phy set vehicle motor force id,-200.0 : key = 1 : phy set vehicle wheel multiplier id,-50
if key = 0 then phy set vehicle motor force id, 0.0
`
rem steering
steeringAngle# = phy get vehicle steering angle ( id )
steeringDelta# = 0.25
key = 0
if keystate ( 205 ) = 1
if steeringAngle# > ( -1.0 + steeringDelta# )
steeringAngle# = steeringAngle# - ( steeringDelta# / 2 )
endif
key = 1
endif
if keystate ( 203 ) = 1
if steeringAngle# < ( 1.0 - steeringDelta# )
steeringAngle# = steeringAngle# + ( steeringDelta# / 2 )
endif
key = 1
endif
if key = 0
if steeringAngle# > 0.0
steeringAngle# = steeringAngle# - steeringDelta# * 2
if steeringAngle# < 0
steeringAngle# = 0.0
endif
endif
if steeringAngle# < 0.0
steeringAngle# = steeringAngle# + steeringDelta# * 2
if steeringAngle# > 0
steeringAngle# = 0.0
endif
endif
endif
phy set vehicle steering angle id, steeringAngle#
phy set vehicle steering value id, -( steeringAngle# * 45 )
`
return
drawabox:
`if loc(0)>0
`ink rgb(255,0,0),0
`line object screen x(drawstartobject+loc(0))-300,object screen y(drawstartobject+loc(0))-baseheight#,object screen x(drawstartobject+loc(0))+300 ,object screen y(drawstartobject+loc(0))-baseheight#
`endif
if loc(3)>3
isindragbox()
makebox()
`ink rgb(0,0,255),0
`line object screen x(id)-300,object screen y(id)-object size y(id),object screen x(id)+300 ,object screen y(id)-object size y(id)
endif
return
remstart
function makezoom(zdist#)
`if camz#>10.0 then camz#=-10.0
local olddist#
`inc camz#,1
`text 0,300,str$(camz#)
if loc(3)<>1 then exitfunction
if olddist#<>zdist#
dragbox(1)=dragbox(1)-zdist#:`x
dragbox(2)=dragbox(2)-zdist#:`y
dragbox(3)=dragbox(3)+zdist#:`x
dragbox(4)=dragbox(4)-zdist#:`y
dragbox(5)=dragbox(5)+zdist#:`x
dragbox(6)=dragbox(6)+zdist#:`y
dragbox(7)=dragbox(7)-zdist#:`x
dragbox(8)=dragbox(8)+zdist#:`y
olddist#=zdist#
endif
makebox()
endfunction
remend
edit found a better file loader
open file code , if your not into spreate file then just stick this on the bottom of above code.
Rem ***** Main Source File *****
`set window on
`print "How to use the Windows file dialog":print
`Print "Choose a file on disk..."
`file$=getFileName("load","This is an open file dialog","Image BMP, GIF or JPG",".bmp;*.gif;*.jpg")
`print "Result: "+file$:print
`Print "Input file name for saving..."
`file$=getFileName("save","This is an save file dialog","Text file",".txt")
`print "Result: "+file$:print
`end
rem Show the file identification dialog
rem Parameters:
rem -------------
rem mode$: "load" or "save"
rem FileBoxTitle$: Title of the dialog. Must not contain the character "^" !
rem ShownFileFilter$: Determines what kind of file the user will be able to choose (visible for the user). Must not contain the character "^" !
rem It looks like this: "Image BMP, GIF, JPG".
rem RealFileFilter$: Determines what kind of file the user will be able to choose (used by the system). Must not contain the character "^" !
rem It looks like this: "*.bmp;*.gif;*.jpg".
rem The first is what the user will see.
rem The second is a list of filters (with ";" as separator).
function getFileName(mode$,FileBoxTitle$,ShownFileFilter$,RealFileFilter$)
FileBoxTitle$ = FileBoxTitle$+"^"
FileFilter$ = ShownFileFilter$+"^"+RealFileFilter$+"^^"
rem Load the DLLs
user32=findFreeDllSlot()
load dll "user32.dll",user32
kernel32=findFreeDllSlot()
load dll "kernel32.dll",kernel32
comdlg32=findFreeDllSlot()
load dll "comdlg32.dll",comdlg32
rem Offset Table OPENFILENAME Struct
lStructSize = 0
hwndOwner = 4
hInstance = 8
lpstrFilter = 12
lpstrCustomFilter = 16
nMaxCustFilter = 20
nFilterIndex = 24
lpstrFile = 28
nMaxFile = 32
lpstrFileTitle = 36
nMaxFileTitle = 40
lpstrInitialDir = 44
lpstrTitle = 48
Flags = 52
nFileOffset = 56
nFileExtension = 58
lpstrDefExt = 60
lCustData = 64
lpfnHook = 68
lpTemplateName = 72
StructEnd = 76
rem OPENFILENAME Flag Table
OFN_ALLOWMULTISELECT = 512:rem 0x00000200
OFN_CREATEPROMPT = 8192:rem 0x00002000
OFN_ENABLEHOOK = 32:rem 0x00000020
OFN_ENABLETEMPLATE = 64:rem 0x00000040
OFN_ENABLETEMPLATEHANDLE = 128:rem 0x00000080
OFN_EXPLORER = 524288:rem 0x00080000
OFN_EXTENSIONDIFFERENT = 1024:rem 0x00000400
OFN_FILEMUSTEXIST = 4096:rem 0x00001000
OFN_HIDEREADONLY = 4:rem 0x00000004
OFN_LONGNAMES = 2097152:rem 0x00200000
OFN_NOCHANGEDIR = 8:rem 0x00000008
OFN_NODEREFERENCELINKS = 1048576:rem 0x00100000
OFN_NOLONGNAMES = 262144:rem 0x00040000
OFN_NONETWORKBUTTON = 131072:rem 0x00020000
OFN_NOREADONLYRETURN = 32768:rem 0x00008000
OFN_NOTESTFILECREATE = 65536:rem 0x00010000
OFN_NOVALIDATE = 256:rem 0x00000100
OFN_OVERWRITEPROMPT = 2:rem 0x00000002
OFN_PATHMUSTEXIST = 2048:rem 0x00000800
OFN_READONLY = 1:rem 0x00000001
OFN_SHAREAWARE = 16384:rem 0x00004000
OFN_SHOWHELP = 16:rem 0x00000010
rem FileBox Info
FileBoxFlags = OFN_EXPLORER + OFN_FILEMUSTEXIST + OFN_PATHMUSTEXIST + OFN_LONGNAMES + OFN_HIDEREADONLY + OFN_NONETWORKBUTTON
PathBufferSize = 256
hWnd = call dll(user32,"GetActiveWindow")
hMod = call dll(kernel32,"GetModuleHandleA",0)
rem Create necessary memblocks
OFN_MB = findFreeMemblockSlot()
make memblock OFN_MB,StructEnd
PathBuffer_MB = findFreeMemblockSlot()
make memblock PathBuffer_MB,PathBufferSize
FileFilter_MB = findFreeMemblockSlot()
make memblock FileFilter_MB,len(FileFilter$)
FileBoxTitle_MB = findFreeMemblockSlot()
make memblock FileBoxTitle_MB,len(FileBoxTitle$)
rem Get the memblocks pointers
OFN = get memblock ptr(OFN_MB)
PathBuffer = get memblock ptr(PathBuffer_MB)
FileFilter = get memblock ptr(FileFilter_MB)
FileBoxTitle = get memblock ptr(FileBoxTitle_MB)
rem write Strings to Memblock
writeStringToMemblock(FileFilter_MB,FileFilter$)
writeStringToMemblock(FileBoxTitle_MB,FileBoxTitle$)
rem Write to OPENFILENAME Struct
write memblock dword OFN_MB,lStructSize,StructEnd
write memblock dword OFN_MB,hWndOwner,hWnd
write memblock dword OFN_MB,hInstance,hMod
write memblock dword OFN_MB,lpstrFilter,FileFilter
write memblock dword OFN_MB,lpstrFile,PathBuffer
write memblock dword OFN_MB,nMaxFile,PathBufferSize
write memblock dword OFN_MB,Flags,FileBoxFlags
write memblock dword OFN_MB,lpstrTitle,FileBoxTitle
rem Open the FileBox
if mode$="save"
call dll comdlg32,"GetSaveFileNameA",OFN
else
call dll comdlg32,"GetOpenFileNameA",OFN
endif
result$ = readStringFromMemblock(PathBuffer_MB)
rem Delete the memblocks
delete memblock OFN_MB
delete memblock PathBuffer_MB
delete memblock FileFilter_MB
delete memblock FileBoxTitle_MB
rem Delete the DLL from the memory
delete dll user32
delete dll kernel32
delete dll comdlg32
endfunction result$
rem Write a character string to the specified memblock
function writeStringToMemblock(numMemblock,text$)
for pos=1 to len(text$)
b=asc(mid$(text$,pos))
if b=asc("^") then b=0
write memblock byte numMemblock,pos-1,b
next pos
endfunction
rem Read a character string from the specified memblock
function readStringFromMemblock(numMemblock)
pos=0:text$=""
do
b=memblock byte(numMemblock,pos)
if b=0 then exit
text$=text$+chr$(b)
inc pos
loop
endfunction text$
rem Return the number of the first unused memblock
function findFreeMemblockSlot()
found=0:numMemblock=1
repeat
if memblock exist(numMemblock)=0 then exitfunction numMemblock
inc numMemblock
until numMemblock=256
endfunction 0
rem Return the first free DLL slot
function findFreeDllSlot()
found=0:numDLL=1
repeat
if dll exist(numDLL)=0 then exitfunction numDLL
inc numDLL
until numDLL=256
endfunction 0
or just change file$="path of model" to save using the loader file system. should find this line near 100 to 110.
Dark Physics makes any hot drink go cold.
